publications
2023

2022
-
 Topological Deep Learning: Graphs, Complexes, SheavesPhD Thesis, University of Cambridge, 2022
Topological Deep Learning: Graphs, Complexes, SheavesPhD Thesis, University of Cambridge, 2022 -
 Sheaf Attention NetworksIn NeurIPS 2022 Workshop on SymFmetry and Geometry in Neural Representations (Oral), 2022
Sheaf Attention NetworksIn NeurIPS 2022 Workshop on SymFmetry and Geometry in Neural Representations (Oral), 2022 -
 Surfing on the Neural SheafIn NeurIPS 2022 Workshop on Symmetry and Geometry in Neural Representations, 2022
Surfing on the Neural SheafIn NeurIPS 2022 Workshop on Symmetry and Geometry in Neural Representations, 2022 -
 Sheaf Neural Networks with Connection LaplaciansIn Topological, Algebraic and Geometric Learning Workshops, 2022
Sheaf Neural Networks with Connection LaplaciansIn Topological, Algebraic and Geometric Learning Workshops, 2022





2021
-

-
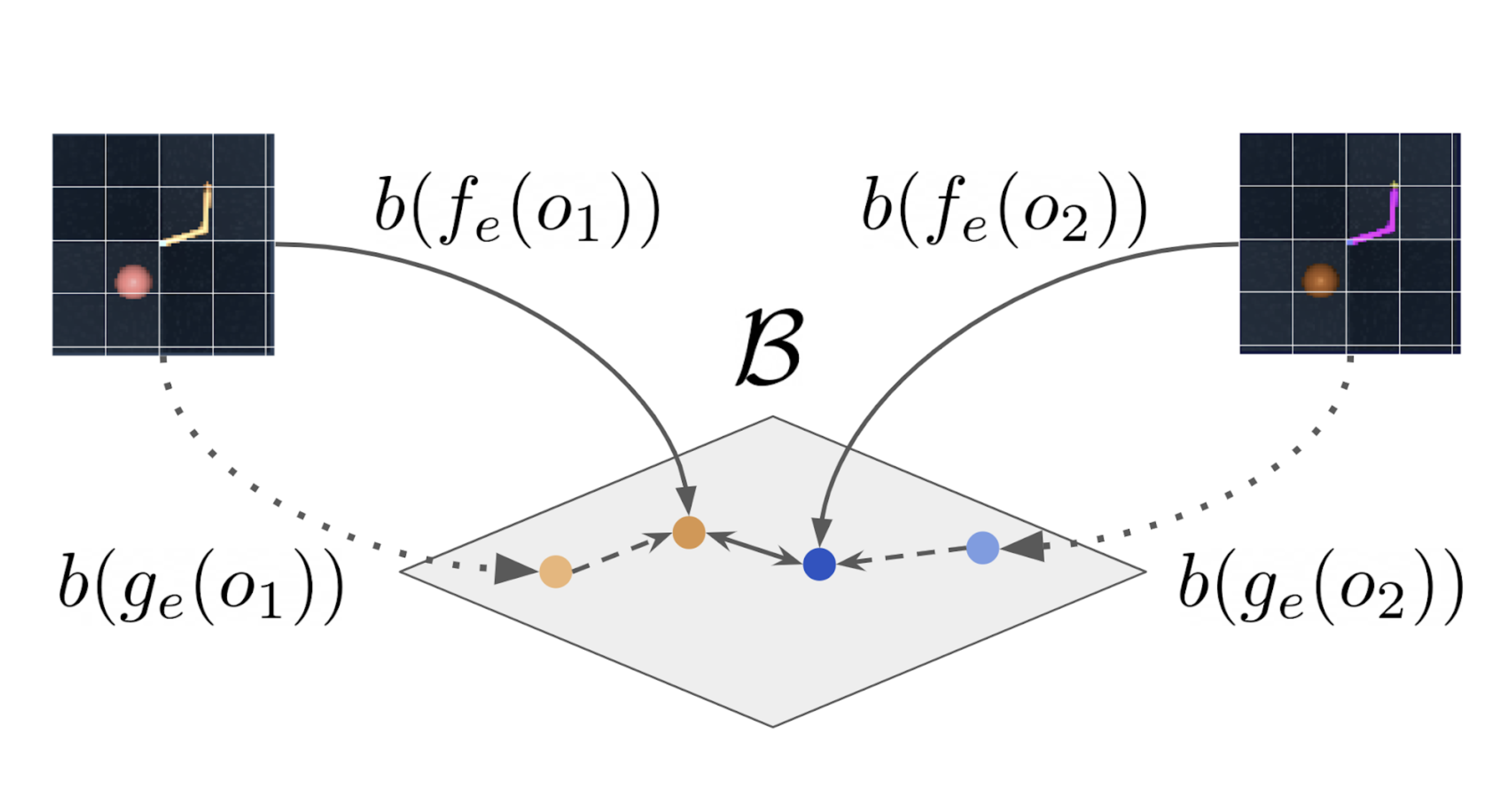 A metric space perspective on self-supervised policy adaptationIEEE Robotics and Automation Letters, 2021
A metric space perspective on self-supervised policy adaptationIEEE Robotics and Automation Letters, 2021





2020
-
 The Role of Isomorphism Classes in Multi-Relational DatasetsAAAI Workshop on Graphs and more Complex structures for Learning and Reasoning, 2020
The Role of Isomorphism Classes in Multi-Relational DatasetsAAAI Workshop on Graphs and more Complex structures for Learning and Reasoning, 2020



